Muy buenas,
Aunque nunca haya dicho nada llevo ya mucho tiempo siguiendo tu proyecto...
Aunque algo perdido con la programación y todo el tema electrónico, según te voy leyendo voy aprendiendo...
Yo tengo en mente empezar en breve con un proyecto que creo que me va a dar tantos o mas vaivenes que a ti este, y eso que yo quiero simplificarlo electrónicamente bastante.
Mi idea es hacer un bicoptero como el que comercializa la empresa canadiense Gress Aeronautics.
http://www.gressaero.com/microvader.html
Soy aeromodelista aficionado y una vez visto que mi 450 lo domino (sin acrobacias) ahora quiero entretenerme en hacer algo con mis propias manos.
Bueno al grano q me lio. Como ves el proyecto tiene su enjundia; me gustaría que fuera sencillo elecronicamente como un tricoptero pero soy consciente de que no es así y que voy a necesitar la ayuda de un circuito Arduino o similar.
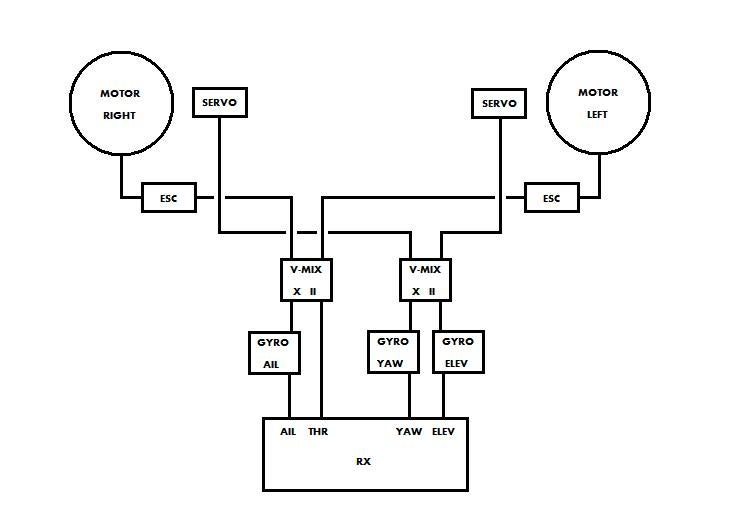
El tema es sencillo, consiste en estabilizar el vuelo con 3 giroscopos en los 3 ejes y utilizar el arduino de "mezclador" para que cada canal se reparta entre los dos servos y los dos motores de manera apropiada. En esta imagen se puede ver a lo que me refiero.
Perdona por hablar de un tema distinto en tu post, prometo que para mas información crearé uno nuevo pero quería que me dieras tu primera opinión, que seguro que se te ocurre un monton de cosas que yo ni me he planteado...
¿Se te ocurre alguna manera mas sencilla de mezclar canales sin usar arduino?
Un saludo y ánimo con tu super proyecto!!




