- Jue, 27 Abr 2017 19:02
#1369657
Buenas,
Kasarex, la prueba de RTL entiendo que la haces parando radio y provocando el failsafe, el velero entra en circle y después en RTL.
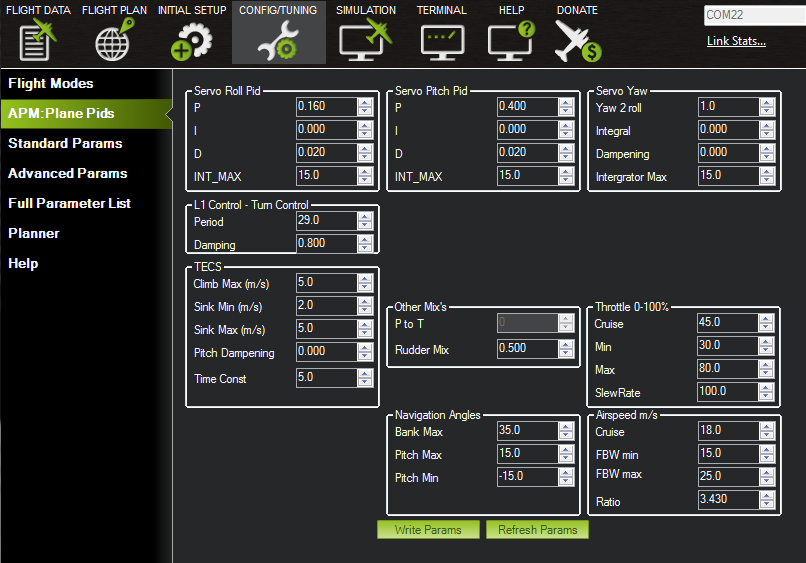
Puedes probar de bajar el tiempo de circle con el parámetro FS_LONG_TIMEOUT a 5 seg. por ejemplo y comprobar el comportamiento.
Estoy de acuerdo con lo que comenta C.Pattex que las diferencias de altura entre la actual y de home afectan en cómo regresa el velero. Si es muy superior, no conectará motor y quizás tras el Circle salga con "propina" por baja velocidad y le cueste a la APM mantener la trayectoria hacia home.
Tienes que comprobar el tiempo de tránsito de CIRCLE a RTL. Primero comprueba a cuántos segundos tienes el parámetro que te comento en el MP, lista de parámetros, y luego si en el vuelo se cumple, independiente de las maniobras del velero.
Saludos.
Kasarex, la prueba de RTL entiendo que la haces parando radio y provocando el failsafe, el velero entra en circle y después en RTL.
Puedes probar de bajar el tiempo de circle con el parámetro FS_LONG_TIMEOUT a 5 seg. por ejemplo y comprobar el comportamiento.
Estoy de acuerdo con lo que comenta C.Pattex que las diferencias de altura entre la actual y de home afectan en cómo regresa el velero. Si es muy superior, no conectará motor y quizás tras el Circle salga con "propina" por baja velocidad y le cueste a la APM mantener la trayectoria hacia home.
Tienes que comprobar el tiempo de tránsito de CIRCLE a RTL. Primero comprueba a cuántos segundos tienes el parámetro que te comento en el MP, lista de parámetros, y luego si en el vuelo se cumple, independiente de las maniobras del velero.
Saludos.