- Vie, 28 Sep 2018 0:39
#1389521
Hola,
al fin me llego el hardware para montar el proyecto que he comentado. Pero primero quiero comprobar que todo funcione al menos encima del escritorio. He leido bastante, pero igual tengo obstaculos que no puedo superar, tambien me di cuenta que hay celdas dentro del MP que son distintas ... veamos si me pueden echar una mano.
Hardware:
- Pixhack 2.8.4 + los cables + buzzer
- Telemetria 433 Mhz
- Power modulo
- GPS ublox neo M8N.
- Radio Turnigy 9X con modulo Frsky interno DHT, y OpenTX.
- Receptor Frsky D4R II (tiene salida de 8 canales en serie puenteando canales 3 y 4... por salida 1 sale la señal..y por la 2 sale RSSI)... aunque dicen que al aprecer en la practica solo funcionan 7 canales a no ser que se le cambie los tiempos de señal (upgradear el firmware).
Conexiones:
Aunque no aparece muy bien explicado me he puesto a ver la info y pude conectar:
- El GPS --- Telemetria en puerto 1 --- Buzzer en el puerto BEEP ---- RX al RCIN --- puse un servo normal en salida PWM1 --- y el Power module al puerto POWER (vi antes si estava bien la letra I y la V...y la tierra y 5V antes de conectar...lei q a veces no vienen ordenados).
- Enchufe la bateria..y al menos no se quemo..jajaja...con tanta luz tintineando parece arbol de pascua.
-----
- Abri Mission Planner...intente instalarlo en PC, pero al parecer es una version que no se necesita instalar, lo abro desde la misma carpeta descomprimida.
- Segui un tutorial en video que explican en 2 lecciones como configurar la APM.
Paso1:
- Me costo encotrar como conectar la FC, pero al final con un cable de celular al USB se hace. El PC lo reconoce en el COM5 (funciona con varias velocidades.. ejemplo 9600... 115200 etc)
- Realice los pasos mencionados en video y aca en el foro
https://www.youtube.com/watch?v=3cXZA3hhq0g
1ra consulta: Al instalar el soft en FC, me dice:
- upload ArduPlane V3.9.1??? -- aprete Yes
a) Upload ChibiOS ??? -- Aca puse NO ...y siguio instalando el firmware... lei que el Chibi OS esta en desarrollo... --- le tendre que poner SI ???
bueno segui con los pasos, instalo todo, realice la conexion con el boton arriba a la derecha CONNECT. ..conecto OK... dentro de casa me agarra 6 satelites aprox..el mapa aparece el avion dibujado...si muevo la placa se mueve el horizonte dentro del MP.
Intente realizar las calibarciones en INITIAL SETUP.
- empece con compas..y paso bien el test.
- Luego la radio: me agarro 4 canales de inmediato ..luego agrege un pod giratorio como canal 5 y un switch de canal 6 y funcionaba en pantalla
dentro de este menu aca se sugiere hacer esto :
"El siguiente paso es realizar la calibración de la emisora, pero antes de empezar la calibración es necesario que ajustemos al máximo el recorrido inferior del mando de gas (en nuestro caso al 150%) ya que nos basaremos en este valor para luego poder realizar la programación del failsafe."
Consulta B)
- Pero no entendi bien..se hace dentro de la emisora?? en EDIT MIX?? es el peso/weight ??? ( en mi radio se puede subir hasta 245)
- y para que sirve hacer esto??
----------
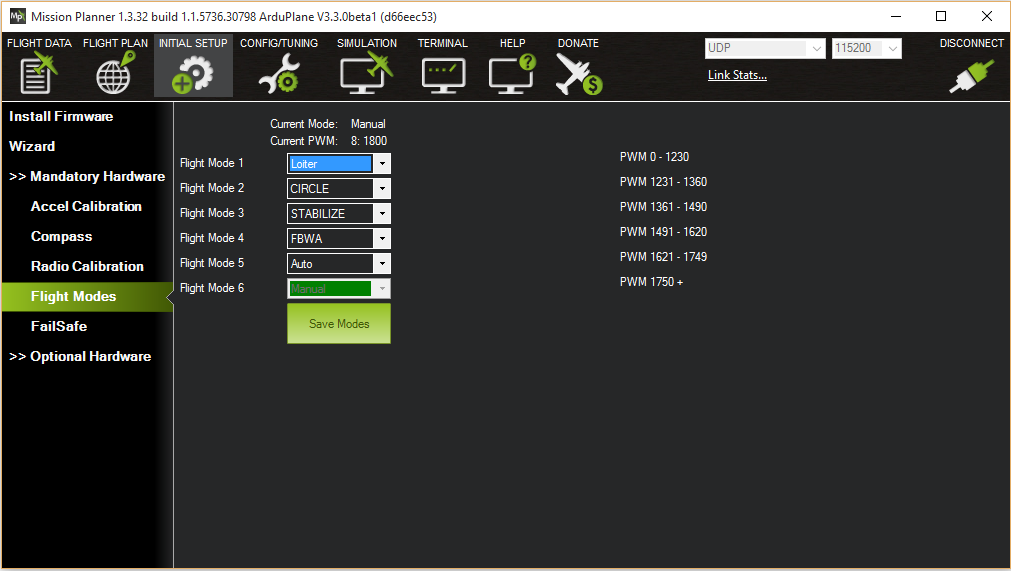
luego segui con los MODOS de VUELO
- y aca no logre hacer nada... creo que me falta programar la radio con los Switch.
- intente buscar en el manual del Open Tx pero no encontre nada parecido para configurar 6 modos de vuelo en 2 Switch.
encontre esta info:
https://diydrones.com/profiles/blogs/mo ... or-turnigy
http://ardupilot.org/plane/docs/common- ... ation.html
c) Pero no tengo como ver la frecuencia de salida...se podria hacer con un Tester que tengo que mide de 0.001 a 1000 hz ???
D) o por ultimo hacer solo 3 modos de vuelo con el switch de 3 posiciones, es funcional?? como se hace?? o copio lo que dice en la pantalla de Mixer del foro Diydrones??
- o existe una forma facil dentro del MP que solo se asigan los switch???
SW 2: 1 SW3: 1 = MANUAL
SW 2: 1 SW3: 2 = FBWA
SW 2: 1 SW3: 3 = AUTOTUNE
SW 2: 2 SW3: 1 = FBWA
SW 2: 2 SW3: 2 = AUTO
SW 2: 2 SW3: 3 = RTL
----------
Failsafe
No pude hacer mucho pq la pantalla es "muy distinta" .. y la configuracion anterior no lo tengo aun, entonces no me aparecia el Titulo (manual, cricle, RTL, etc) .
----------
Monitor de bateria
en menú OPTIONAL HARDWARE y el botón BATTERY MONITOR.
- Creo que aca hay que buscar el modelo del Power Modulo.. pero el que tengo viene sin nombre, asi que elegi el mismo de la foto de explicacion aca en foro: - 1: APM2 - 2.5 non 3DR -
- Intente seguir los pasos descritos ...pero la celda 2 no para de mover los numeros, entonces no esta reconociendo la lectura de la bateria.
E) quizas pueda ser que esta conectada la FC por USB y corta la entrada de la bateria???
SOLUCIONADO:
- Al poder conectar la telemetria y no ocupar el USB a la FC -> ahora si mide la bateria el MP.
- Me falta hacer el calculo del consumo de amperes para poder rellenar las casillas 4, 5 y 6
NOTA:
en mi MP
la casilla 4 -- dice Modo vuelo 3
casilla 5 - modo de vuelo 4
casilla 6 - Amperes per volt.
CONSULTA: estara bien esto?? o es error del soft MP???
---------
Configurar por medio de la telemetria
- No pude hacer funcionar la telemetria en el USB del PC...tengo Windows 10.
F) Necesitare un driver??
SOLUCIONADO: bajar drivers --> https://www.pololu.com/docs/0J7/all#2
Luego en pantalla INITIAL SETUP- SIK RADIO -> apretar LOAD Settings, y debera cargar datos del enlace de la telemetria (fijarse en Tx power de ambos modulos este el numero 20 que es el maximo de señal).
---------
Esto por el momento,
seguire ver en que mas puedo avanzar,
Gracias.
al fin me llego el hardware para montar el proyecto que he comentado. Pero primero quiero comprobar que todo funcione al menos encima del escritorio. He leido bastante, pero igual tengo obstaculos que no puedo superar, tambien me di cuenta que hay celdas dentro del MP que son distintas ... veamos si me pueden echar una mano.
Hardware:
- Pixhack 2.8.4 + los cables + buzzer
- Telemetria 433 Mhz
- Power modulo
- GPS ublox neo M8N.
- Radio Turnigy 9X con modulo Frsky interno DHT, y OpenTX.
- Receptor Frsky D4R II (tiene salida de 8 canales en serie puenteando canales 3 y 4... por salida 1 sale la señal..y por la 2 sale RSSI)... aunque dicen que al aprecer en la practica solo funcionan 7 canales a no ser que se le cambie los tiempos de señal (upgradear el firmware).
Conexiones:
Aunque no aparece muy bien explicado me he puesto a ver la info y pude conectar:
- El GPS --- Telemetria en puerto 1 --- Buzzer en el puerto BEEP ---- RX al RCIN --- puse un servo normal en salida PWM1 --- y el Power module al puerto POWER (vi antes si estava bien la letra I y la V...y la tierra y 5V antes de conectar...lei q a veces no vienen ordenados).
- Enchufe la bateria..y al menos no se quemo..jajaja...con tanta luz tintineando parece arbol de pascua.
-----
- Abri Mission Planner...intente instalarlo en PC, pero al parecer es una version que no se necesita instalar, lo abro desde la misma carpeta descomprimida.
- Segui un tutorial en video que explican en 2 lecciones como configurar la APM.
Paso1:
- Me costo encotrar como conectar la FC, pero al final con un cable de celular al USB se hace. El PC lo reconoce en el COM5 (funciona con varias velocidades.. ejemplo 9600... 115200 etc)
- Realice los pasos mencionados en video y aca en el foro
https://www.youtube.com/watch?v=3cXZA3hhq0g
1ra consulta: Al instalar el soft en FC, me dice:
- upload ArduPlane V3.9.1??? -- aprete Yes
a) Upload ChibiOS ??? -- Aca puse NO ...y siguio instalando el firmware... lei que el Chibi OS esta en desarrollo... --- le tendre que poner SI ???
bueno segui con los pasos, instalo todo, realice la conexion con el boton arriba a la derecha CONNECT. ..conecto OK... dentro de casa me agarra 6 satelites aprox..el mapa aparece el avion dibujado...si muevo la placa se mueve el horizonte dentro del MP.
Intente realizar las calibarciones en INITIAL SETUP.
- empece con compas..y paso bien el test.
- Luego la radio: me agarro 4 canales de inmediato ..luego agrege un pod giratorio como canal 5 y un switch de canal 6 y funcionaba en pantalla
dentro de este menu aca se sugiere hacer esto :
"El siguiente paso es realizar la calibración de la emisora, pero antes de empezar la calibración es necesario que ajustemos al máximo el recorrido inferior del mando de gas (en nuestro caso al 150%) ya que nos basaremos en este valor para luego poder realizar la programación del failsafe."
Consulta B)
- Pero no entendi bien..se hace dentro de la emisora?? en EDIT MIX?? es el peso/weight ??? ( en mi radio se puede subir hasta 245)
- y para que sirve hacer esto??
----------
luego segui con los MODOS de VUELO
- y aca no logre hacer nada... creo que me falta programar la radio con los Switch.
- intente buscar en el manual del Open Tx pero no encontre nada parecido para configurar 6 modos de vuelo en 2 Switch.
encontre esta info:
https://diydrones.com/profiles/blogs/mo ... or-turnigy
http://ardupilot.org/plane/docs/common- ... ation.html
c) Pero no tengo como ver la frecuencia de salida...se podria hacer con un Tester que tengo que mide de 0.001 a 1000 hz ???
D) o por ultimo hacer solo 3 modos de vuelo con el switch de 3 posiciones, es funcional?? como se hace?? o copio lo que dice en la pantalla de Mixer del foro Diydrones??
- o existe una forma facil dentro del MP que solo se asigan los switch???
SW 2: 1 SW3: 1 = MANUAL
SW 2: 1 SW3: 2 = FBWA
SW 2: 1 SW3: 3 = AUTOTUNE
SW 2: 2 SW3: 1 = FBWA
SW 2: 2 SW3: 2 = AUTO
SW 2: 2 SW3: 3 = RTL
----------
Failsafe
No pude hacer mucho pq la pantalla es "muy distinta" .. y la configuracion anterior no lo tengo aun, entonces no me aparecia el Titulo (manual, cricle, RTL, etc) .
----------
Monitor de bateria
en menú OPTIONAL HARDWARE y el botón BATTERY MONITOR.
- Creo que aca hay que buscar el modelo del Power Modulo.. pero el que tengo viene sin nombre, asi que elegi el mismo de la foto de explicacion aca en foro: - 1: APM2 - 2.5 non 3DR -
- Intente seguir los pasos descritos ...pero la celda 2 no para de mover los numeros, entonces no esta reconociendo la lectura de la bateria.
E) quizas pueda ser que esta conectada la FC por USB y corta la entrada de la bateria???
SOLUCIONADO:
- Al poder conectar la telemetria y no ocupar el USB a la FC -> ahora si mide la bateria el MP.
- Me falta hacer el calculo del consumo de amperes para poder rellenar las casillas 4, 5 y 6
NOTA:
en mi MP
la casilla 4 -- dice Modo vuelo 3
casilla 5 - modo de vuelo 4
casilla 6 - Amperes per volt.
CONSULTA: estara bien esto?? o es error del soft MP???
---------
Configurar por medio de la telemetria
- No pude hacer funcionar la telemetria en el USB del PC...tengo Windows 10.
F) Necesitare un driver??
SOLUCIONADO: bajar drivers --> https://www.pololu.com/docs/0J7/all#2
Luego en pantalla INITIAL SETUP- SIK RADIO -> apretar LOAD Settings, y debera cargar datos del enlace de la telemetria (fijarse en Tx power de ambos modulos este el numero 20 que es el maximo de señal).
---------
Esto por el momento,
seguire ver en que mas puedo avanzar,
Gracias.



{kind=link}